|
“人工智能(AI)太热也不是一件好事。” “在技术圈,年轻不会被质疑。”“我们是在创造一个新的市场。”尽管刚刚过去的2016年,AI几乎成为科技界的最炙热话题,但是在该领域做研究已有近五年,创业已有两年多的速感科技CEO陈震,却对AI创业、融资、技术和发展有很多不同的看法。
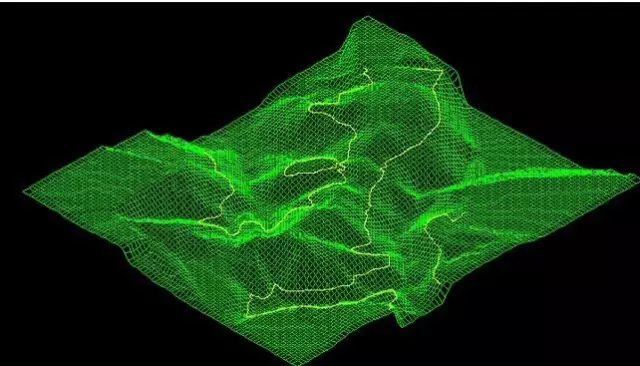
陈震 速感科技创始人 SLAM技术与AI创业 在刚刚落幕的有着IT风向标美誉的CES展上,全力发展汽车自动驾驶系统的Nvidia抢占了头条,人称“AI教父”的黄仁勋主要讲了Nvidia用于自动驾驶的Drive PX2芯片,预计到2020年,Nvidia的无人驾驶技术就将可达到第4级,要知道在美国国家公路交通安全管理局(NHTS)的自动驾驶分级中,3级为有条件自动化、4级则是高度自动化、最高级5级则是完全自动化。芯片巨头转型AI公司,黄仁勋引领着一个全新的时代。 陈震看到的却不仅是自动驾驶的快速推进,更是通用芯片走向专有芯片的巨大变化,这与他正做的AI垂直细分领域的创业理念契合,在他专注的“机器视觉”里,设定的目标是为机器人构建一个“三维世界”,开辟专有视觉芯片的市场是他对未来五年的计划。 视觉对机器人意味着什么呢?简单说来,机器视觉是一门研究如何使机器“看”的科学。从本科到研究生阶段,再到2014年出来创业以后,前后5年的时间里,始终聚焦在机器视觉领域学习的陈震比较清晰地看到,“在这几年时间里,以视觉为核心的,包括人脸识别、物体识别、空间定位、导航避障等在内的感知层算法正在随着底层人工智能的基础型算法架构(比如我们现在熟知的机器学习、深度学习,以及最近很火的增强学习)和硬件传感器的发展产生着日新月异的变化。” 硕士毕业于清华大学信息交叉学科(计算机方向)信息科学国家实验室的陈震,在实验室的时候主要研究方向是为特种机器,包括微小型的无人机、功能性的机器人构建一套以视觉感知为主的机器人视觉系统,在2011年后发展起来的这一波感知层算法的进步与传感器硬件上面的推陈出新恰恰为这样的研究提供了有利的支持,以至于到今天推动了整个资本市场上对于人工智能项目的大热与追捧。
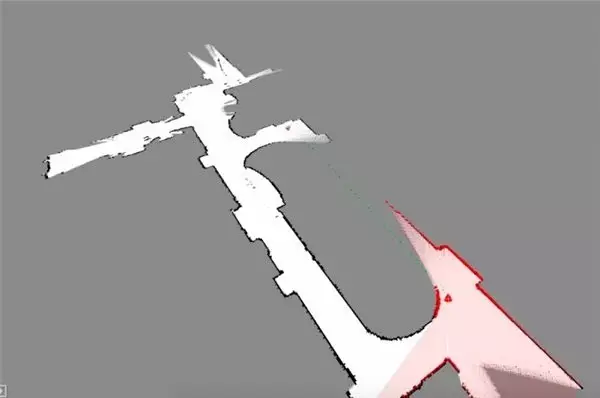
由于他所提到的算法SLAM (simultaneous localization and mapping,即时定位与地图构建)具有重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。陈震和他的合伙人速感科技CTO张一茗,也是他北京航空航天大学的同学,是从2012年开始接触这一技术的,到2014年创业时,除了国内一些研究机器人自动化技术的实验室和老师,几乎做图形图像的学术圈都没怎么听说过SLAM,更不用说当时的创业公司和资本市场。 而今天,几乎整个人工智能领域似乎都对SLAM这一技术报以极大的关注与期望。“我认为SLAM技术在资本市场上获得极大的关注有很大一部分原因是去年美国明星创业团队Magic Leap在AR领域的技术探索,微软公司在去年推出的Hololens以及今年10月份Google开源了一套SLAM算法密不可分的。”由于在这之前,大家都没有听说过SLAM这一技术,更不必说意识到这一技术在机器人领域取得突飞猛进的进步。 为机器人构建“三维世界” 机器人自诞生之日起,视觉功能就是其最核心的功能与智能化的入口,三维视觉已经在近10年的发展中逐渐成为机器人的主流与标准配置,用以解决以往移动机器人“看不见”这一难题。 结合SLAM算法,很多人觉得掌握了它就解决了机器人移动这样关键性的基本问题,陈震却认为,SLAM在今天对于人工智能机器人等领域的发展,已经越来越像深度神经网络一样,成为一项基础性的工具。“它只是让机器人看到了世界,并不能真正指导机器人的决策,因此我们需要利用这样的模型,回到具体环境中有针对性的进行接下来的自主导航与路径规划等方案的开发。” 看到了和看得懂的区别在哪里呢?陈震以扫地机器人为例,“你用扫地机器人吗?你认为它是什么样的机器人?”在他眼里,扫地机器人“真的有点笨。”这也是大多数用户的共识,如果真能“看得懂”,扫地机器人应该像一个真正的人扫地一样,设置路径提高效率…… 针对“看不懂”的痛点,陈震和他的团队是基于vSLAM算法(vSLAM简单来说是用视觉的方法完成实时定位和地图构建)进行产品化最早的。他们针对机器人在环境中的全局路径规划和局部路径规划,开发了一套鲁棒性高,可以实时决策的路径规划与导航算法框架,可以有针对性的结合vSLAM得到的最优计算结果,进行有效的多传感器融合与前端处理器的嵌入式集成,使其可以在不同复杂的环境中获得良好的表现结果。
从2016年3月份开始,速感科技就开始在前端传感器上做算法的集成。速感科技采用的是含ARM和DSP的片上系统来做视觉传感模块,以更低成本和更高效率完成对定位信息的解算。在性能方面,它具备更高的定位能力,目前比较适用于中高端机器人产品。 除此之外,他们还在低价版传感器上力争突破,通过寻找合作的原材料供应商、对传感器的架构进行重新设计等方式降低成本。当然,在成本减半的同时性能也会减半,低价版传感器的探测范围大概是在3-5米,相较于现有激光雷达这个距离稍显劣势,但对于一些低端应用比如低端扫地机器人来说这个探测范围是足够的了。 (责任编辑:admin) |
| Tags: 侍从官之肩 www.26qq.cn 视觉质男 手贱暖羊羊 受托远行 兽人星球之兽性之血 兽性大发之为虎作娼 鼠猫一诺千年 束缚东宫txt新浪 双龙军品 双牌二中贴吧 双阙txt新浪 |


栏目分类
创业项目相关信息
热门创业项目文章推荐

“厕所野战”女星哭诉:他带我
近日,闹得香港满城风雨的“厕所野-
2018年小本创业,很多人看不上
许多人想创业,干一番事业,但又苦 -
小伙景区玩PS卖金秀贤合照 月
6月19日,有微博网友爆料,说自己 -
首届大学生创业大赛决赛今天拉
湖北,黄石,新闻.东楚网是您了解黄 -
黄金酥豆腐 人见人爱
市场信息报 -
电子商务带动新疆疏附县群众创
一手拿锄头、一手握鼠标,新疆疏附 -
10个小成本创业项目赚足商机
小成本创业做什么好?现如今小本创 -
小生意,赚大钱
俗话说,条条大路通罗马。在走向人 -
78创业日3.6亿大派送 创业圆梦
78创业日3.6亿大派送 创业圆梦省钱 -
大学生创业项目方案
大学生创业项目方案,青岛有个14岁
广告赞助商
创业项目文章阅读排
- 1、功能饮料功能饮料市场,在过去一年不断有
- “厕所野战”女星哭诉:他带我进去 亲我(1)
- 微立拍品牌投资创业快速成功
- 女孩小本创业好意见 一年600头猪纯利润多少
- 2018年小本创业,很多人看不上眼的冷门高利润
- 创业投资应避免一哄而上(感言)
- 小伙景区玩PS卖金秀贤合照 月入上万羡煞网友(
- 昆明高新区构建创新创业全链条孵化企业500多
- 女辅导员与在校男大学生隐婚 放弃留校(图)
- 首届大学生创业大赛决赛今天拉开帷幕
- 淮北市首届青年创客暨电子商务创业大赛圆满落
- 一路飘香小吃车,小本投资大生意!
- 涉县:“小额借款圆了我们的创业梦
- 做好新形势下就业创业去留北京又做选择
- [财经]大庆首家互联网+创业咖啡开业,开启地
- 小本创业需谨慎 创客”拣错铺 半年亏20万
- 第三次!火箭海外引援又受挫 黑山天才已赴俄
- 黄金酥豆腐 人见人爱
- 解读四川小本投资冒菜加盟项目零风险的计划书
- 仔皇煲创始人:连锁快餐店怎样创业?
◎ 主页 > 创业项目 > INTRODUCE
90后创业为机器赋能“看得懂”的智慧(组图)
侍从官之肩
www.26qq.cn
视觉质男
手贱暖羊羊
受托远行
兽人星球之兽性之血
兽性大发之为虎作娼
鼠猫一诺千年
束缚东宫txt新浪
双龙军品
双牌二中贴吧
双阙txt新浪


顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
特别说明
此处放横条广告
◎ 阅读说明READ EXPLANATION
☉推荐使用第三方专业下载工具下载本站软件,使用 WinRAR v3.10 以上版本解压本站软件。
☉如果这个软件总是不能下载的请点击报告错误,谢谢合作!!
☉下载本站资源,如果服务器暂不能下载请过一段时间重试!
☉如果遇到什么问题,请到本站论坛去咨寻,我们将在那里提供更多 、更好的资源!
☉本站提供的一些商业软件是供学习研究之用,如用于商业用途,请购买正版。
谈谈您对该文章的看